“船海科澜”定期专题发布学校最新科技成果、技术进展和应用案例,致力于为广大科技工作者和企业提供科技成果对接平台,助力学校科技成果转化。
01
。
成果简介
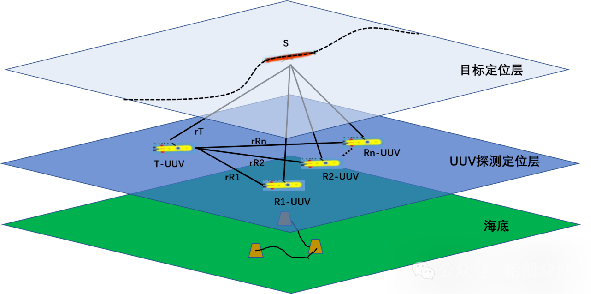
面向主要面向深海环境中多无人航行器协同实现全覆盖、高精度、快速对底扫测和水下运动目标的识别跟踪的任务需求,突破多AUV协同导航技术、多AUV协同控制技术和多AUV协同目标识别跟踪技术,综合协同探测作业性能指标达到国际先进水平。
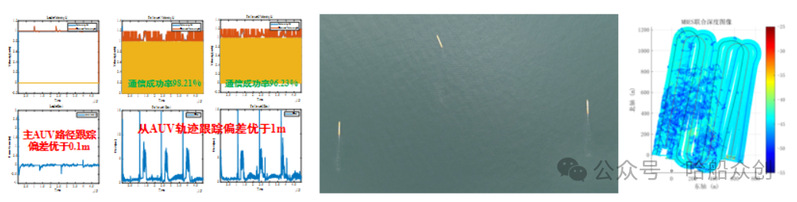
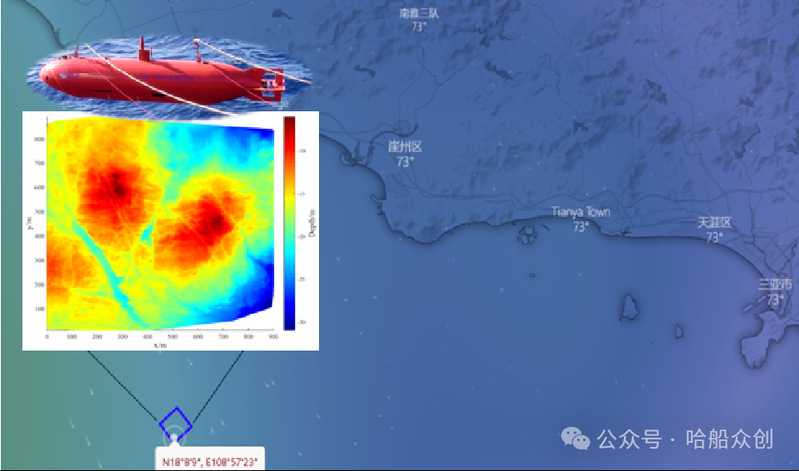
针对长航时任务中惯导误差累积以及水声弱通信(间隔大、延迟高、带宽小)导致一致性控制难和编队发散等难题。5000s可高质量完成0.8km2地形测绘,多AUV协同测绘精度较单AUV提升6.5%,多AUV扫测效率为单AUV的2.54倍。使我国具备利用AUV集群可靠开展深海快速探测的能力,技术成熟度达到6级。
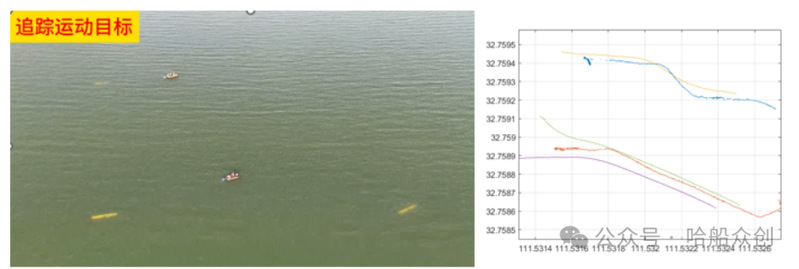
针对目标跟踪过程中运动目标速度动态变化和水声弱通信(间隔大、延迟高、带宽小)导致的群体信息共享等难题。对目标的检测识别和稳定跟踪成功率优于80%,同等硬件下成功率提升8%以上。使我国具备利用AUV集群对运动目标进行检测识别和协同跟踪的能力,技术成熟度达到5级。

02
。
核心技术点/创新举措
1.多AUV协同导航与控制:针对长航时任务中一致性控制难、航行编队发散等难题,突破基于水声测距与有限通信信息的多AUV协同导航控制技术,协同控制精度达到厘米级,协同扫测效率达到单体的2.54倍,协同地形测绘精度提升6.5%。
2.多AUV协同目标识别跟踪:针对机动目标动态特征和信息共享协同等难题,突破多模交叉注意力特征融合、小样本目标主动认知学习技术,目标协同识别跟踪成功率提升8%以上。
03
。
技术特点
1.多AUV协同对底扫测:3台AUV能够形成并保持稳定的编队队形,水声通信测距信息相对稳定,平均跟踪误差为1.3456m,从2#AUV水声通信成功率为96.23%,平均跟踪误差为1.4287m。
2.多AUV协同对运动目标的跟踪控制:完成3台“悟空1000”AUV水下对运动目标的协同跟踪湖上验证,实测对目标的检测识别和稳定跟踪成功率优于80%,感知系统能够以超过80%的成功率准确检出目标状态,决策控制系统保证了多AUV对目标的一致、连续、稳定跟踪。
04
。
主要应用领域
海工领域风电场检测、油气开采、海底矿产调查。
05
。
知识产权及相关成果
已搭载于某AUV样机,实现了海底地形智能认知与主动定位演示验证;支持水下无人航行器集群协同搜索扫测作业,成果目前申请发明专利11项。
06
。
对接方式
船舶工程学院科技成果转化工作专班
刘帅克 13895794353,0451-82589181
杨 衡 13654589727,0451-82589181
哈尔滨工程大学成果转化中心
谢俊锋 0451-82588071
(文章来源:哈尔滨工程大学船舶工程学院)
END