“船海科澜”定期专题发布学校最新科技成果、技术进展和应用案例,致力于为广大科技工作者和企业提供科技成果对接平台,助力学校科技成果转化。
一、成果简介
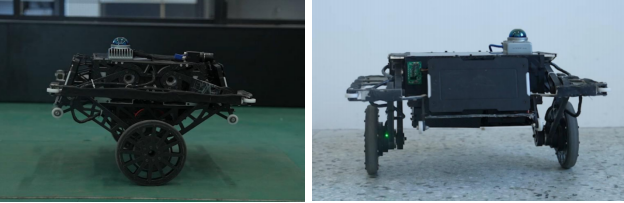
核电站的日常巡检通常要依靠人工或者传统机器人去完成,存在地形适用性弱、复用性差、抗辐射性能差等特点,基于我国核电领域现状以及切实工作经验,团队创新性提出:五连杆轮腿机构,大大提高机器人的灵活性与稳定性,更好地做到多地形适应;基于拓展卡尔曼滤波融合IMU滤波的被动态势感知算法与图像处理技术,可在强辐射环境下清晰成像,并开发了一种基于slam和深度学习,融合辐射环境信息的主动态势感知系统,实现了对核电仪表的精准识别、最小辐射路径自动导航与CCTV无损检测,另以解决产品轻量化问题。
 |
二、应用领域
可在核电站内完成日常仪器仪表的数值读取、管道异物勘测等人力难以触及区域的检测。除此之外,可在环境检测、矿道监测等恶劣或复杂环境下代替工人完成勘测、搜救、侦察、运输等任务,整机性能已达到国内外先进水平。
目前,本产品可耐辐照剂量达1000Gy,跨壕宽度可达0.75m,最快飞行速度可达到5m/s,可爬最大角度为45°。
三、市场前景
该产品在核电站安全巡检过程中,相对于人工巡检,效率提升且更精准;相较于传统履带式核电检测机器人,更加灵活不受地域限制。结合主动态势感知系统精准识别核电仪表并以其独特的五连杆轮腿机构自适应仪表高度进行检测,就像在为核电站“心脏”做“体检”。
目前,该巡检机器人已在核电站环境内试用。经测试,整机性能相较于市面上已有的核电检测机器人已达国内外先进水平。“该项目具有非常好的工程应用价值。”中国广核集团运营公司首席维修技师陈永伟为项目点赞。此外,该项目在近日举办的2024年中国小微特机器人专项邀请赛暨首届“机器人+安全应急”成果验证赛上夺得冠军,其灵活稳定的操作得到企业关注。
本产品兼具轮式结构和腿式结构,并且通过算法实现了该类机器人的大部分功能,可以满足兼容机动性的同时为上层机构提供较高的稳定性。轮腿式结构使得平衡机器人的越障能力和整体性能得到了质的提升,有着重要的研究意义。
四、知识产权
围绕核心技术,申请、授权发明专利13件,软件著作权4件。
五、合作方式
作价入股。
六、对接方式
(1)合作意向方联系哈工程科技园技术转移中心;
(2)哈工程科技园技术转移中心沟通了解意向方情况;
(3)会同成果完成团队与意向方共同研讨合作方案。
哈尔滨工程大学国家大学科技园技术转移中心
电 话:0451-82588071
联系人:王春龙
邮 箱:wangchunlong@hrbeu.edu.cn